I progetti sono ben presentati con una ottima sequenza fotografica, la prima foto che dichiara visivamente il progetto seguita dal materiale necessario per proseguire compresi gli step pieni di dettagli tecnici ed operativi.
Vi lascio al suo articolo su come costruire un braccio robotico esortandovi a diventare bravi makers come lui.

Materiale necessario:
-n°4 servomotori Monza SSA65 da modellismo
-n°3 prolunghe per servo da 30 cm
-Radiocomando e ricevente turnigy X9 (più economico)
-Batteria da 6 volt
-Lastra di Plexiglass di 3-4 mm di spessore
-Tubolare in alluminio
-Lamierino in alluminio
-Viti
-Trapano
-Attrezzi vari
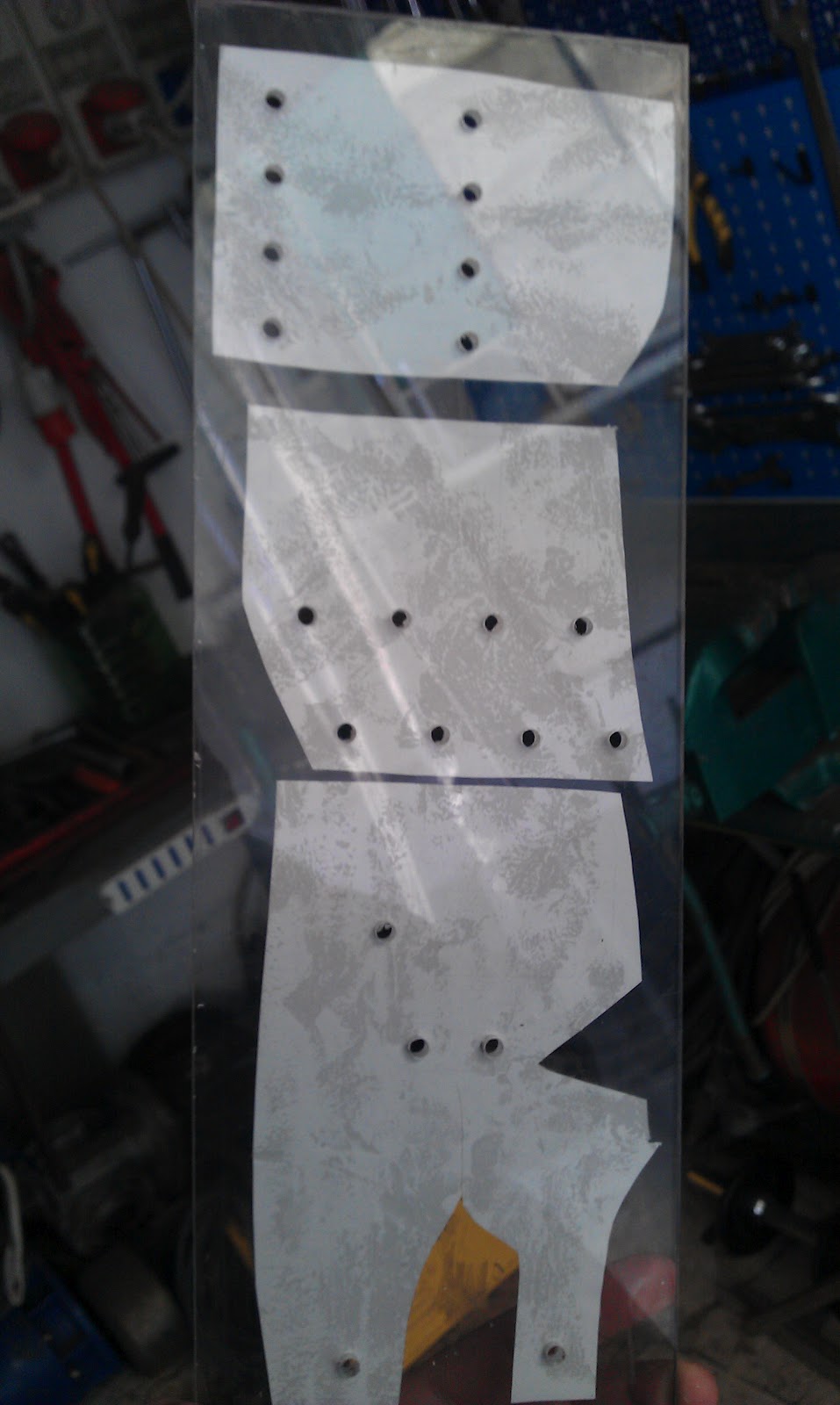
Cominciamo stampando questo modello della pinza ingrandendolo fino alle dimensioni desiderate ottenendo così 2 fogli(per intuire la grandezza della pinza basta considerare la lunghezza del pezzo trapezoidale e dei quattro pezzi leggermente ricurvi).
Considerate che la grandezza è inversamente proporzionale alla manovrabilità; infatti più saràgrande e pesante la pinza e più i servomotori saranno soggetti a sforzo.
L’unica cosa importante è non variare la distanza fra i fori che serviranno per montare in sede il servomotore(i due fori piccoli vicino a quello grande).


Incollare saldamente con della colla i fogli del modello sulla lastra di plexiglass e cominciare dai primi fori per poi ricavare i singoli elementi:

Assemblare tutti gli elementi con viti e bulloni (non troppo serrati) fino ad ottenere una pinza robotica simile a questa:

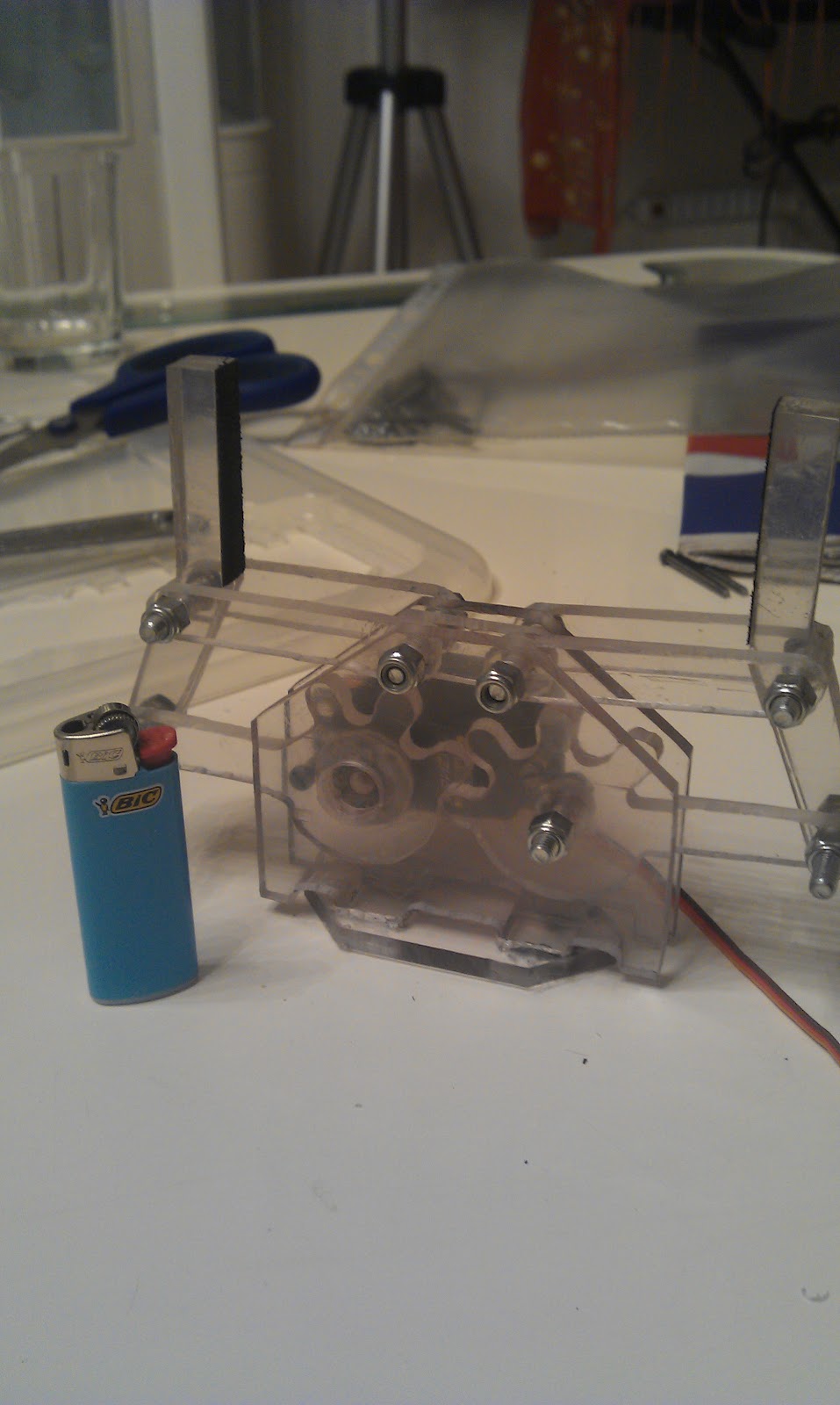
Ora si può montare il servomotore per l’azionamento della pinza:

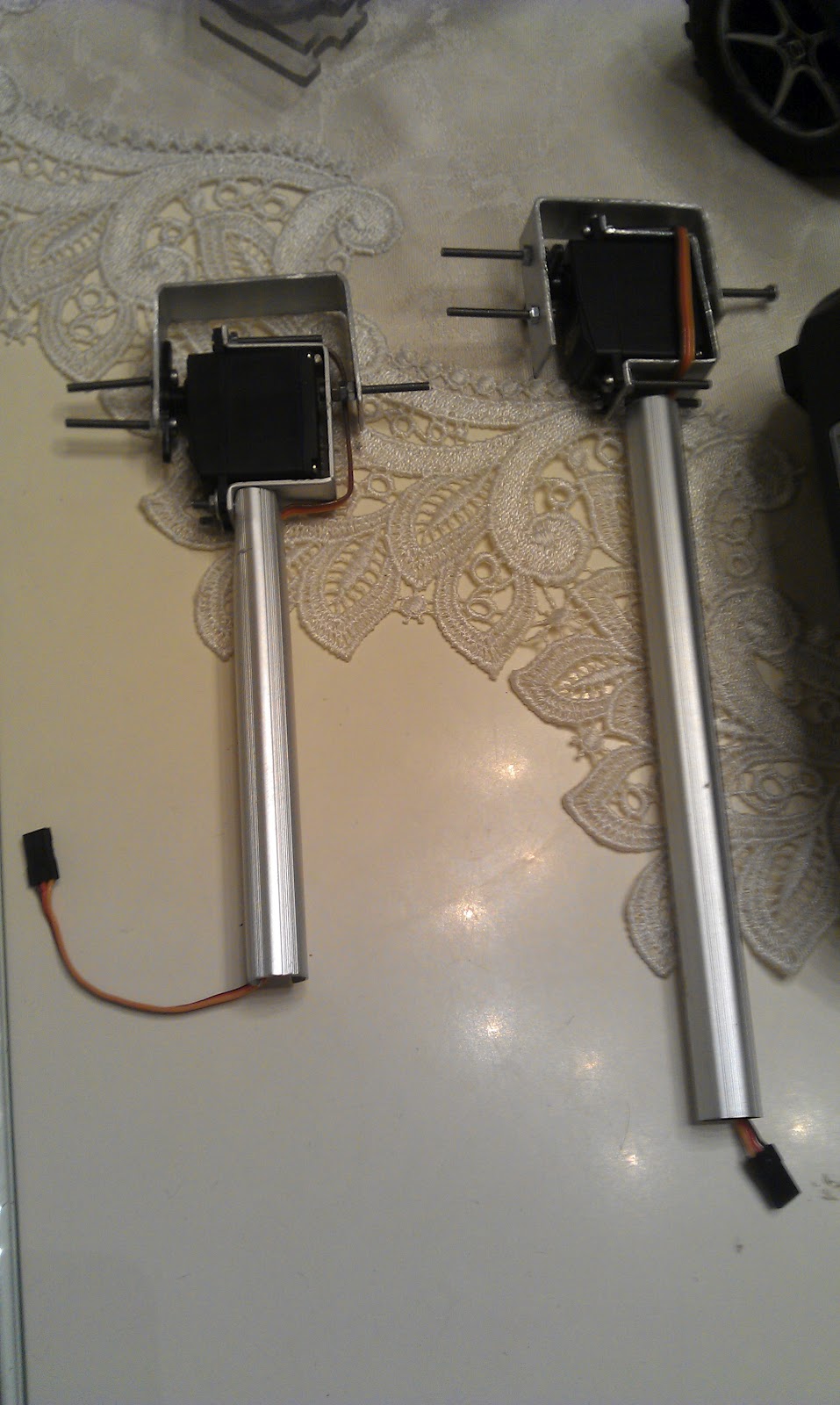
Posizionare la squadretta (nella confezione del servo) nell’ingranaggio e con il lamierino di alluminio realizzare l’intelaiatura del servo e la parte mobile che lo collega alla mano:

Si possono notare più dettagli fra cui:
-tubolare con svasatura per permettere il passaggio delle prolunghe dei cavi dei servomotori
-staffa in lamierino incollata con supercolla alla pinza(o imbullonata a seconda del peso da sollevare)
-foro di uscita nel lamierino per permettere l’uscita dei cavi dal servo
-staffetta aggiuntiva che collega il telaio del servo al tubolare(possibilmente imbullonata)
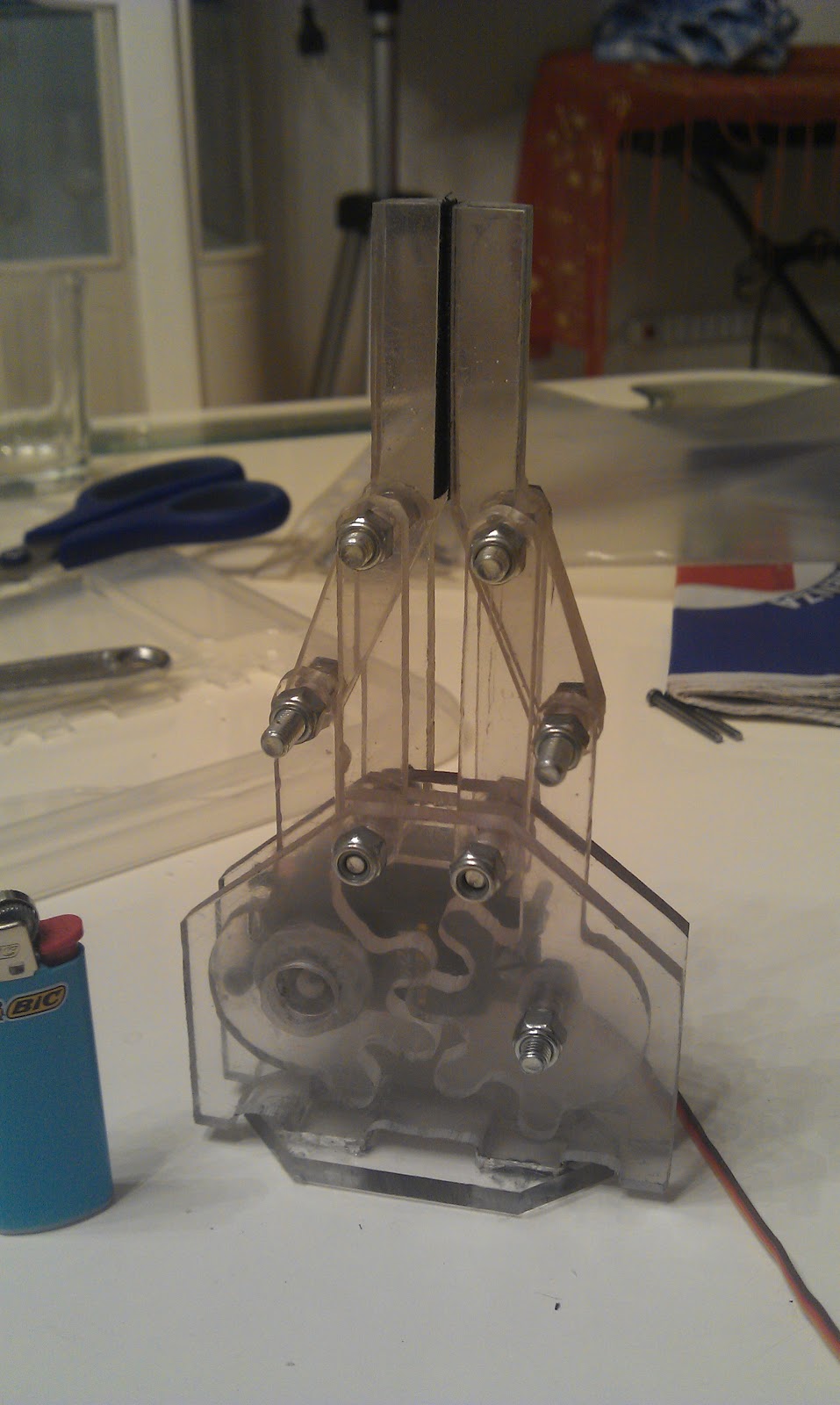
Dopo aver terminato “il polso” procediamo con “il gomito”;
Continuando in modo simile realizziamo le staffe per “il gomito” del nostro braccio robotico,ovvero l’intelaiatura e la parte mobile,ricordando sempre di lasciare spazio ai cavi del servo e assicurandoci che il movimento sia libero e fluido.

Ora ripetiamo tutti i passaggi anche per “la spalla” che sarà abbastanza simile:
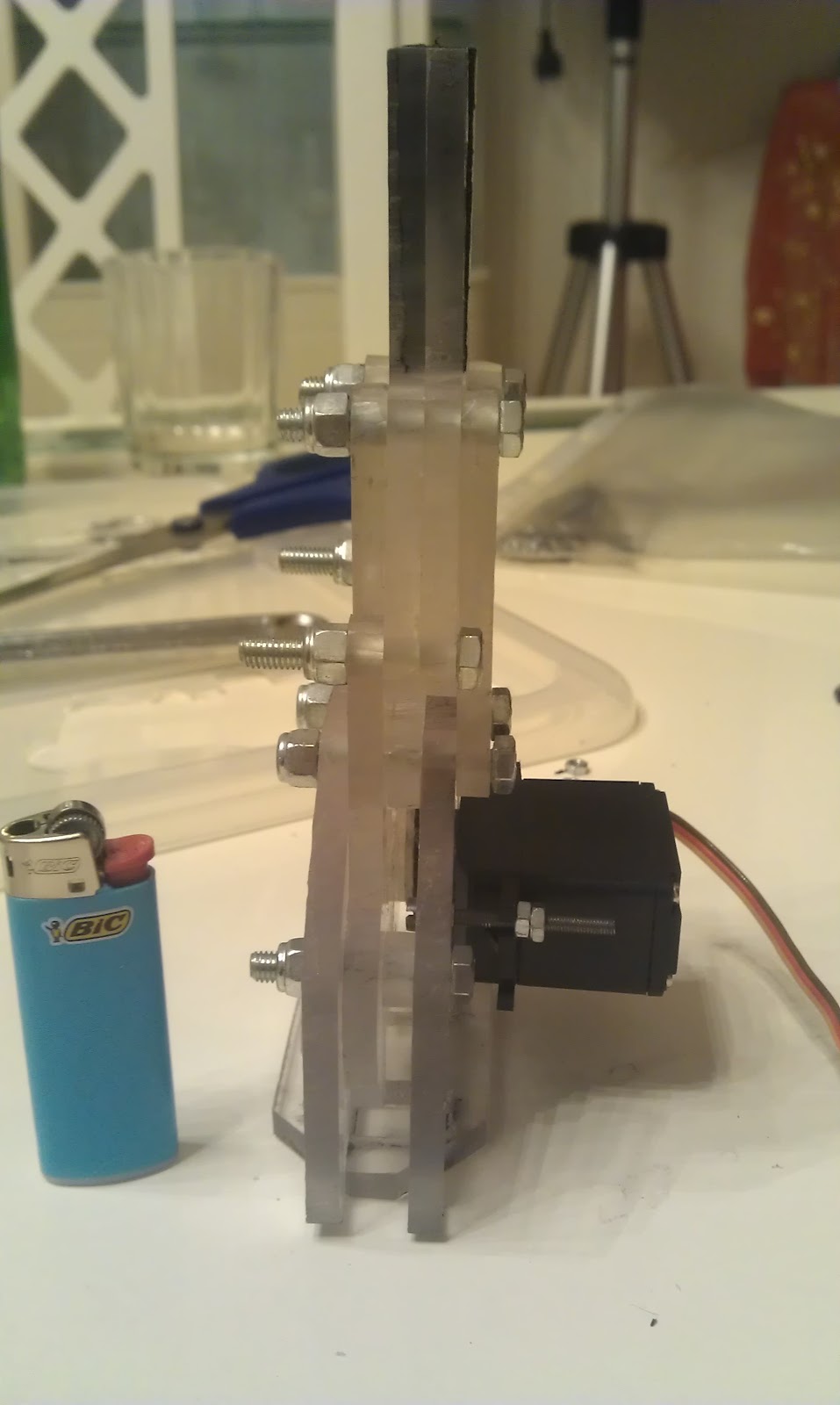
Accorciamo le viti e limiamo qualche difetto ed ecco che il nostro braccio robotico inizia a prendere forma. Un ultima parte meccanica ci rimane da creare prima di passare all’elettronica;ovvero la base che sosterrà tutta la nostra creazione:
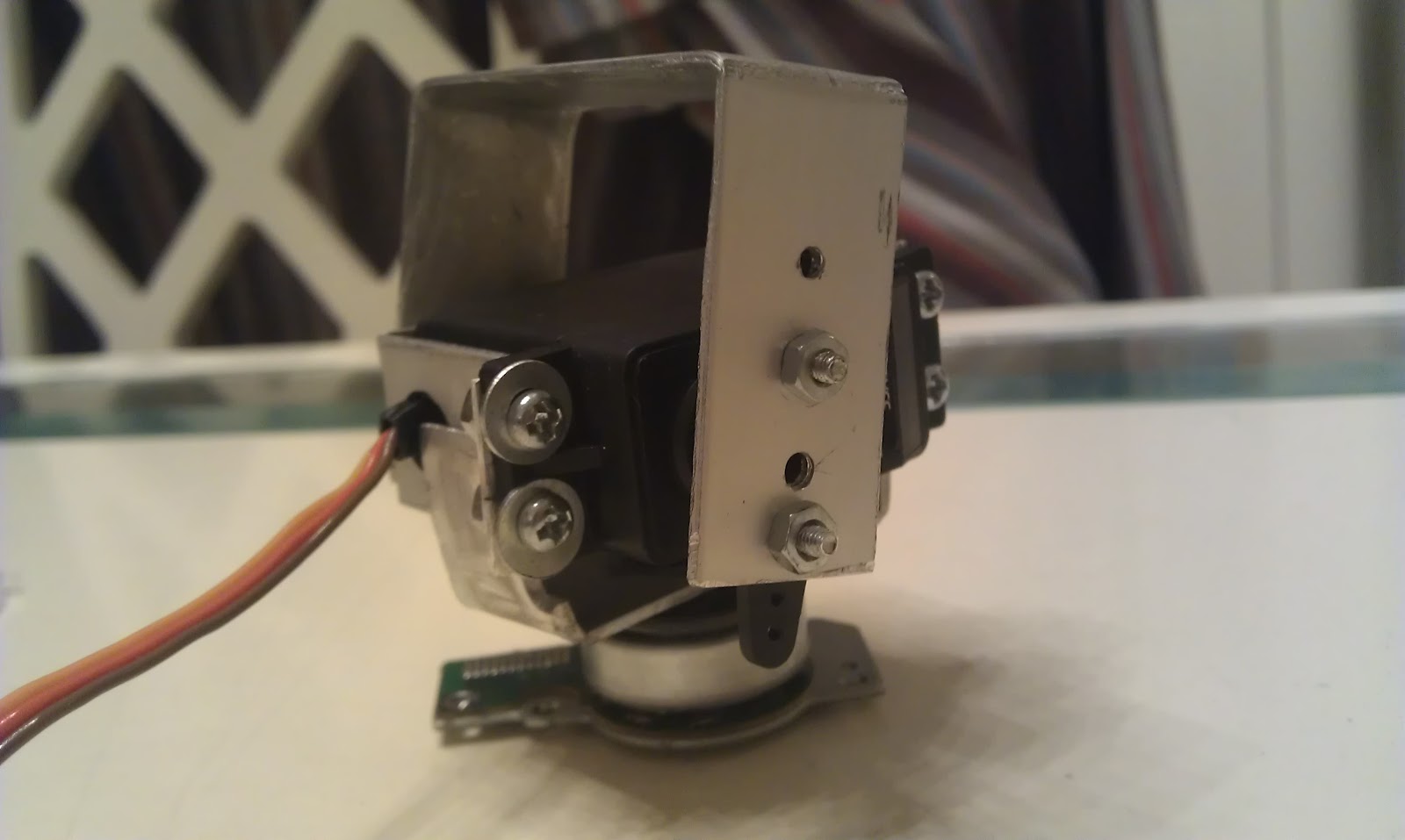
é composta da un servomotore che poggia su di un cuscinetto libero di ruotare a 360° così da permettere la massima libertà di movimento entro il raggio del braccio robotico.
Ecco un altro dettaglio :

In quest’altra immagine si può vedere la base che poggia sul telaio di un drone rover che però è ancora in fase di costruzione..
In questo caso potrà ruotare grazie al servomotore accanto che le trasmette il moto,ma in base a cosa voi vogliate realizzare dovrete cambiare l’impostazione e la collocazione dei singoli elementi.

La costruzione ci ha portato fin qui:

Ed ora finalmente si può passare all’elettronica:
Iniziando dalla batteria da 6v,che andrà collegata alla ricevente del radiocomando nel primo canale(quello con scritto bind)..
Come secondo passaggio c’è bisogno di collegare il radiocomando alla ricevente,processo chiamato binding cheè ben visibile qui nel video:
Perfetto,adesso collegate i servomotori ai canali liberi della ricevente e regolate il radiocomando in base ai movimenti che dovrà effettuare il vostro nuovo braccio robotico o robot arm che dir si voglia!!
Spero di essere stato abbastanza chiaro..che dire….
Buon divertimento!